The Plotter is an Industrial Ethernet demo by PHYTEC that brings together EtherCAT stacks by Kunbus, PLC programming by CODESYS, the latest AM64x/AM243x silicon from TI, and AWS IoT Greengrass services enabling fleet management to showcase real-time motor control synchronized across a daisy chain of independent systems.The purpose of this over-engineered CNC machine demo is to showcase TI’s new AM64x/AM243x silicon, their pre-integrated industrial Ethernet protocols from Kunbus, and PHYTEC’s familiarity with integrating these into novel designs.
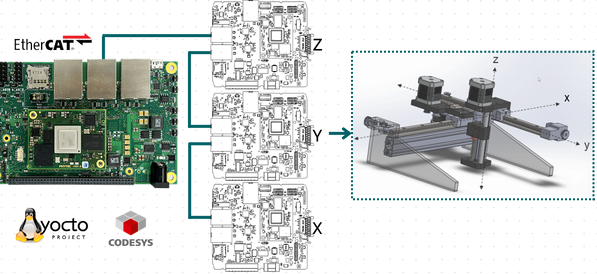
A phyCORE-AM64x development kit presides over the entire system as the EtherCAT Main device. The AM64x’s Cortex-A53s runs Arago Linux built with Yocto and leverages CODESYS runtime services to establish a EtherCAT network on one of its standard Ethernet ports. The EtherCAT network is used to communicate to a series of daisy-chained Secondary devices, based on the PLC-style phyGATE-AM243x.
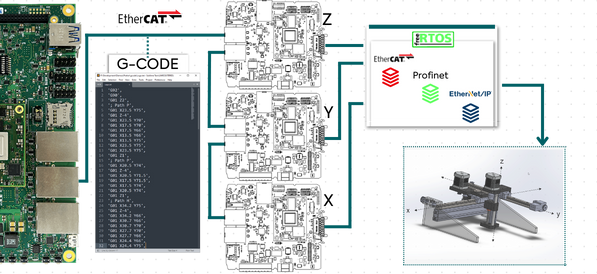
Each Secondary device is responsible for a single axis of the Pen Plotter and receive commands and synchronization information via G-code instructions sent over EtherCAT from the Main device. The Secondary devices all run freeRTOS from TI’s MCU+ SDK on their Cortex-R5s and include pre-integrated industrial Ethernet stacks (EtherCAT, Profinet, EtherNET/IP and others) that run on the AM243x’s Industrial Communication Subsystems (PRU-ICSSG).
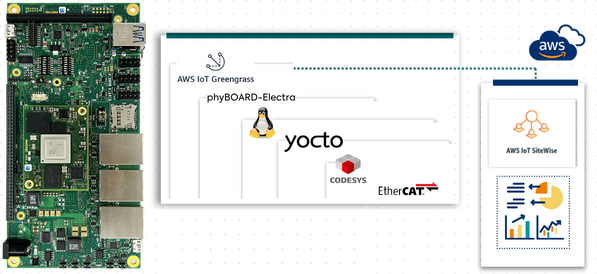
The phyCORE-AM64x EtherCAT Main device is provisioned with AWS IoT Greengrass via the meta-aws project, which enables support to be built directly into the Linux software image using Yocto. AWS IoT Greengrass components deployed on the EtherCAT Main device allow cloud-based tools such as AWS IoT Sitewise to analyze and monitor data being broadcasted from the edge.
PHYTEC phyBOARD-AM64x and phyCORE-AM64x
Scan the QR code below (or use your phone camera) to see the development kit and contact PHYTEC Sales!
* Yocto Project and all related marks and logos are trademarks of The Linux Foundation. This website is not, in any way, endorsed by the Yocto Project or The Linux Foundation
EtherCAT is a real-time industrial Ethernet protocol that enables short cycle times and low jitter on a super flexible connection topology; it enables deterministic control of modular machines in noisy environments such as a manufacturing floor.
PHYTEC will use the terms “Main” and “Secondary” to describe EtherCAT device roles. Note that the official EtherCAT standard still uses outdated “Master” and “Slave” terminology.
{kind=link}
{kind=link}
{kind=link}